
Overview
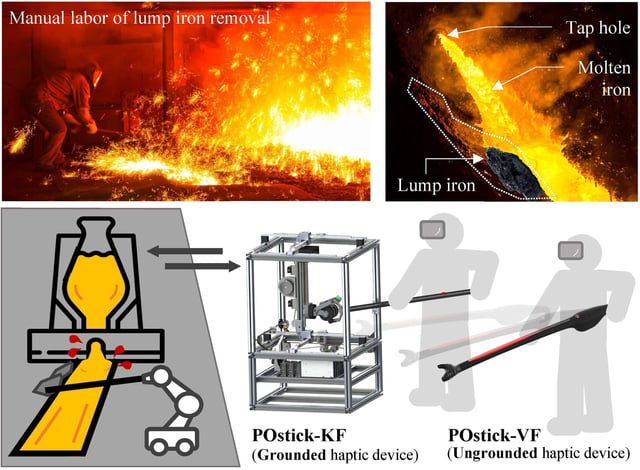
- POSTECH researchers, led by Professor Keehoon Kim and Jaehyun Park, developed two haptic devices—POstick-KF and POstick-VF—designed for remote robotic manipulation in hazardous industrial settings.
- The POstick-KF provides kinesthetic feedback for precise force control, while the POstick-VF combines visual and tactile feedback, enhancing training and usability in larger workspaces.
- Simulation trials showed these devices improved manipulation accuracy and reduced collisions compared to conventional haptics, with POstick-VF offering notable training benefits over time.
- The system incorporates digital twin simulations and augmented reality (AR) to allow operators to rehearse tasks virtually and improve their focus during live operations.
- Published in IEEE Transactions on Industrial Informatics, the research is now supported by POSCO Holdings and positioned for industrial trials aimed at advancing human–robot collaboration.